2022-07-19 16:35:25
Cão robô é usado para entender como os filhotes de animais aprendem a caminhar
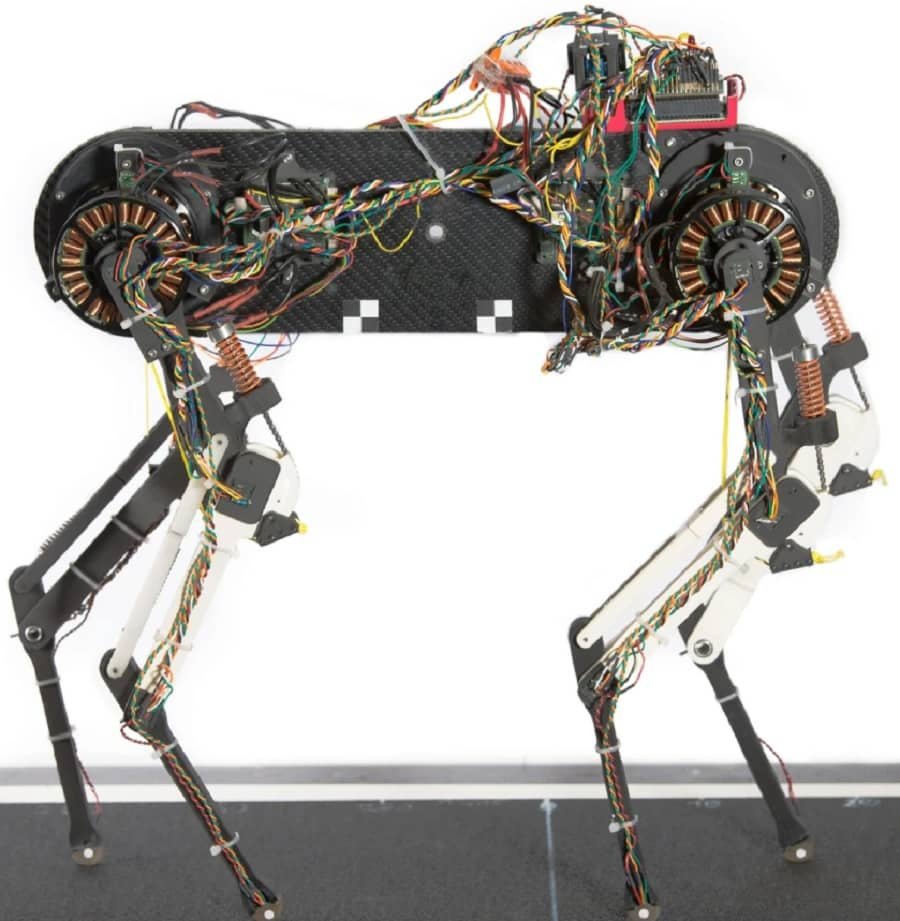
Imagem: Imagem: Max Planck de Sistemas Inteligentes (MPI-IS)
Um bebê girafa, assim como outros animais selvagens quadrúpedes, deve aprender a andar sobre suas pernas o mais rápido possível para evitar predadores. No entanto, assimilar a coordenação precisa dos músculos das pernas e tendões leva algum tempo.

Eles nascem com redes de coordenação muscular dotada de fios rígidos localizados em sua medula espinhal dos quais dependem para se manter em pé e se mover através de reflexos neurais.
Embora um pouco mais básicos, os reflexos do controle motor ajudam o filhote a evitar cair e se machucar durante suas primeiras tentativas de caminhada. Em seguida, é praticado um controle muscular mais avançado e preciso, até que eventualmente o sistema nervoso esteja bem adaptado aos músculos e tendões das pernas do animal para ele conseguir acompanhar os adultos.
Pesquisadores do Instituto Max Planck de Sistemas Inteligentes (MPI-IS) em Stuttgart, na Alemanha, conduziram um estudo (publicado na revista Nature Machine Intelligence) para descobrir como os animais aprendem a andar e superar os tropeços. Para isso, eles construíram um robô de quatro patas, do tamanho de um cão de médio porte, que os ajudou a descobrir os detalhes.

“Como engenheiros e profissionais de robótica, buscamos a resposta construindo um robô que apresenta reflexos como um animal e aprende com os erros”, revelou em comunicado Felix Ruppert, ex-doutorando no grupo de pesquisa de locomoção dinâmica do MPI-IS. “Se um animal tropeça, isso é um erro? Não se acontecer uma vez. Mas se ele tropeça com frequência, nos dá uma medida de quão bem o robô anda”.
Algoritmo de aprendizagem otimiza medula espinhal virtual do cão robô
Um algoritmo bayesiano de otimização orienta o aprendizado da máquina: as informações medidas do sensor de pé são combinadas com dados de destino da medula espinhal virtual modelada funcionando como um programa no computador do robô. Ele aprende a andar comparando continuamente informações enviadas e recebidas do sensor, executando loops reflexos e adaptando seus padrões de controle motor.
O algoritmo de aprendizagem adapta parâmetros de controle de um
Gerador de Padrão Central (CPG). Em humanos e animais, esses geradores
de padrão central são redes de neurônios na medula espinhal que produzem
contrações musculares periódicas sem entrada do cérebro.
Redes geradoras de padrão central auxiliam na geração de tarefas rítmicas, como caminhada, piscadas ou digestão. Além disso, reflexos são ações involuntárias de controle motor desencadeadas por vias neurais codificadas que conectam sensores na perna com a medula espinhal.
Enquanto o jovem animal caminha sobre uma superfície perfeitamente plana, os CPGs podem ser suficientes para controlar os sinais de movimento da medula espinhal. Uma pequena colisão no chão, no entanto, muda a caminhada. Reflexos entram em ação e ajustam os padrões de movimento para evitar que o animal caia.
Essas alterações momentâneas nos sinais de movimento são reversíveis, ou “elásticas”, e os padrões de movimento retornam à sua configuração original após a perturbação. Mas, se o animal não parar de tropeçar em muitos ciclos de movimento – apesar dos reflexos ativos – então os padrões de movimento devem ser reparados e tornados “plásticos”, ou seja, irreversíveis.

No animal recém-nascido, os CPGs inicialmente ainda não são ajustados o suficiente e o animal tropeça ao redor, tanto em terrenos uniformes quanto irregulares. O animal, todavia, aprende rapidamente como seus CPGs e reflexos controlam os músculos e tendões das pernas.
O mesmo vale para o cão robô batizado de “Morti”, que, além disso, otimiza seus padrões de movimento mais rápido que um animal, em cerca de uma hora. Seu CPG é simulado em um computador pequeno e leve que controla o movimento de suas pernas.
A medula espinhal virtual é colocada no robô quadrúpede no lugar onde estaria a cabeça. Durante a hora que leva para o robô andar suavemente, os dados do sensor de seus pés são continuamente comparados com o esperado tropeço previsto pelo CPG.
Se isso acontece, o algoritmo de aprendizagem muda o quão longe e o quão rápido as pernas balançam para frente e para trás e medem quanto tempo ele fica no chão. O movimento ajustado também afeta o quão bem o robô pode utilizar sua mecânica de perna compatível. Durante o processo de aprendizagem, o CPG envia sinais motorizados adaptados para que o robô passe a tropeçar menos e otimize sua caminhada.
Nesta estrutura, a medula espinhal virtual não tem conhecimento explícito sobre o design das pernas do robô, seus motores e molas. Não sabendo nada sobre a física da máquina, falta um robô “modelo”.
“Nosso robô é praticamente ‘nascido’ sem saber nada sobre suas pernas autônomas ou como elas funcionam”, explica Ruppert. “O CPG se assemelha a uma inteligência de caminhada automática incorporada que a natureza fornece e que transferimos para o robô. O computador produz sinais que controlam os motores das pernas, e o robô inicialmente anda e tropeça. Os dados voltam dos sensores para a medula espinhal virtual, onde os dados do sensor e do CPG são comparados. Se os dados do sensor não correspondem aos dados esperados, o algoritmo de aprendizagem muda o comportamento de caminhada até que o robô ande bem, sem tropeçar. Alterar a saída do CPG, mantendo os reflexos ativos e monitorando o tropeço do robô, é uma parte central do processo de aprendizagem”.
Baixo consumo de energia torna mecanismo mais viável
Enquanto robôs quadrúpedes industriais de fabricantes proeminentes, que aprenderam a correr com a ajuda de controladores complexos, têm muita fome de energia, o computador de Morti necessita de apenas cinco watts no processo de andar.
“Não podemos pesquisar facilmente a medula espinhal de um animal vivo. Mas podemos modelar um no robô”, diz Alexander Badri-Spröwitz, coautor do estudo e chefe do Dynamic Locomotion Research Group, no Max Planck. “Sabemos que esses CPGs existem em muitos animais. E sabemos que os reflexos estão incorporados, mas como podemos combinar ambos para que os animais aprendam movimentos com reflexos e CPGs? Esta é uma pesquisa fundamental na intersecção entre robótica e biologia. O modelo robótico nos dá respostas a perguntas que só a biologia não pode responder”.

